






木卫四 | 基于征程6的汽车网络安全解决方案
2024/09/13

方案简介
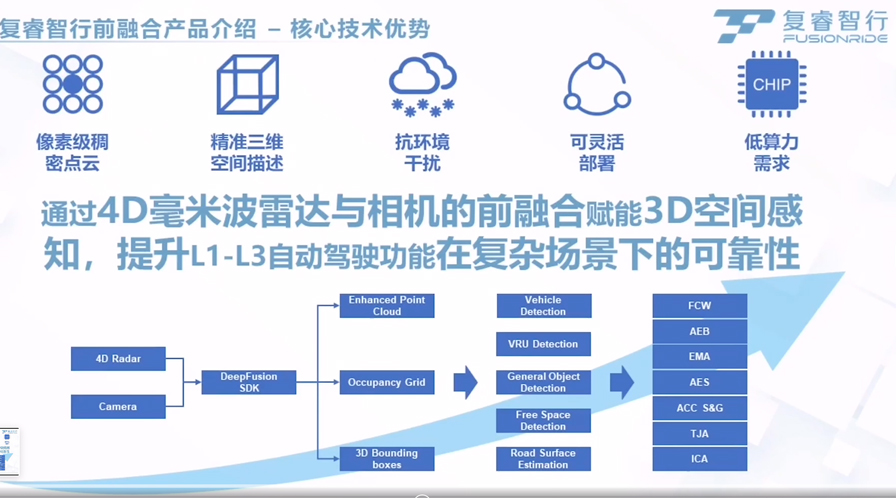
这款专门为自动驾驶域控制器端侧开发的产品,部署在域控制器操作系统底层,从域控网络层、系统层和功能应用层三个维度全面地监控并阻断黑客对域控制器的攻击。它使用异常检测算法来检测风险行为和威胁,并根据结果采取相应的缓解措施。此外,创新性结合汽车的有边界集,例如运动状态和位置,以及无边界集,例如event和智能化的服务的数据,更全面地检测和防范潜在的威胁。 木卫四结合数百万辆汽车的安全经验及征程6特点,从轻量化、便捷化、支持二次开发及高效迭代、易于满足合规设计等方面进行了安全功能的设计和开发。与TogetheROS.auto 智能驾驶应用开发套件深度融合,支持开发者快速高效完成基于安全车载网络的智能驾驶应用开发。

特色优势
域控制器全方位防护:在域控制器上可以有效地检测并阻止各种潜在的网络攻击和数据泄露,已发布车联网网络安全和数据安全法规及标准覆盖度达100%。目前已经迭代上线针对11个攻击场景(如:阻断非法远程控车攻击)的38项功能。
适应性强:开箱即用,基于交叉编译链可快速适配各种基于J6复杂系统环境。
高效性和准确性:得益于大数据和大模型的应用,安全监测的效率和准确性得到了提高。该技术的检测效率高一方面使得车端可以快速地对车牌和人脸等敏感信息进行脱敏,另一方面平台基于汽车专有数据分析,能够辅助完成这一过程,并采取相应的措施进行预警和干预。
可视化技术的应用:监测数据的可视化使得监测机构能够更直观、更便捷地了解车辆状况和安全风险。

应用场景
行泊一体
分享文章







欢迎订阅地平线相关资讯,您可以随时取消订阅。

提交成功!
感谢您的订阅, 我们会第一时间推送地平线最新活动与资讯到您邮箱


