






学术前线 | MapTR:基于结构化建模的矢量高精地图实时在线构建方法
2022/09/08



晴天&阴天

雨天

夜晚
蓝色-pedestrian crossing,黄色-lane divider,绿色-road boundary
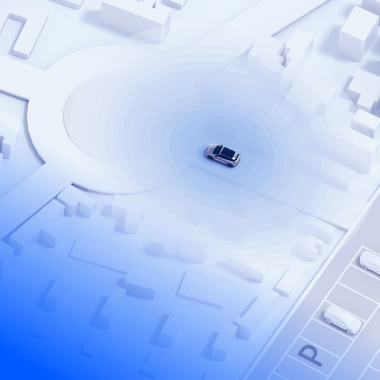
图1 MapTR在多样而复杂的驾驶场景中都能稳定地构建高质量的矢量地图
背景
矢量高精地图(vectorized high-definition map)是应用于自动驾驶的高精度结构化电子地图,其由驾驶场景各类地图要素(如人行横道、车道线、路沿等)的矢量化表示构成,为决策规划、轨迹预测、环境感知提供重要的高层级语义信息。
以往的高精地图通常以离线的方式构建,即利用地图采集车的车载传感器(激光雷达、相机、惯导等)采集场景数据,并通过自动化和人工相结合的方式对数据进行处理和矢量化语义标注。离线建图的主要挑战在于:1)采集、处理和标注都需要大量的人力和时间成本,且流程繁琐;2)道路信息动态变化,离线构建的地图时效性差,需要高频更新来保证地图的准确性;3)考虑到信息安全,离线地图无法覆盖到保密要求高的区域;4)当拓展到大规模大范围的高精地图应用时,离线建图在人力、时间和维护成本上的问题将更加凸显。
在线建图是指在自动驾驶车辆行驶过程中利用车载传感器实时地感知自车周围的地图要素并生成地图。在线建图无需人工处理、标注和维护,相比离线建图,成本低,可拓展性强,易用性强。然而,目前的在线建图方法在建图质量和建图速度两方面都难以达到自动驾驶实际应用的要求。高质量高效率在线建图成为了业界亟待解决的技术难题。
针对这一问题,地平线联合华中科技大学Vision Lab提出了基于结构化建模的矢量高精地图实时在线构建方法——MapTR。MapTR通过对地图要素的结构化建模消除表示上的歧义性,降低地图要素的复杂度和学习难度,并且采用端到端的结构化框架高效地生成矢量高精地图。MapTR在nuScenes数据集上达到了最好的建图质量和实时的运行速度。丰富的可视化结果表明(如图一),MapTR在多样而复杂的驾驶场景中都能稳定地构建高质量的矢量地图。MapTR展现了在线建图方案的潜力,具有很高的应用价值和落地前景,有助于推动自动驾驶技术的发展。
地图要素结构化建模

端到端训练







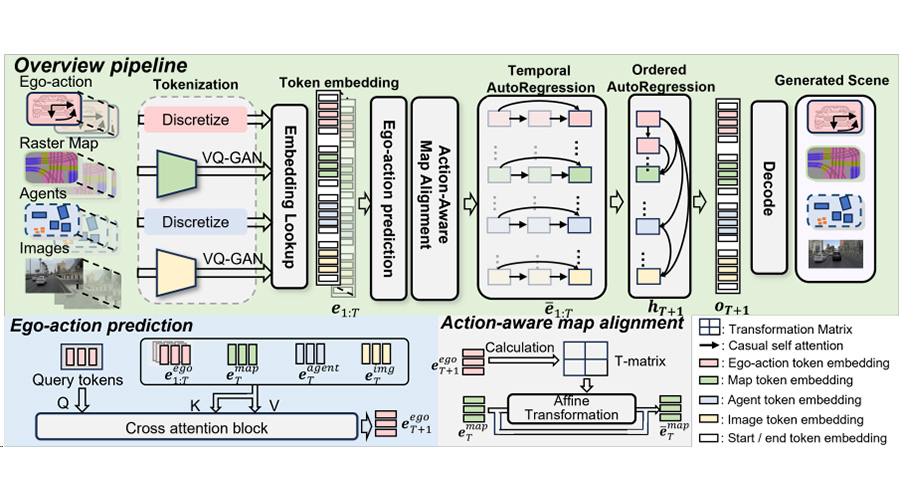
结构化建图框架

图三 结构化建图框架
实验

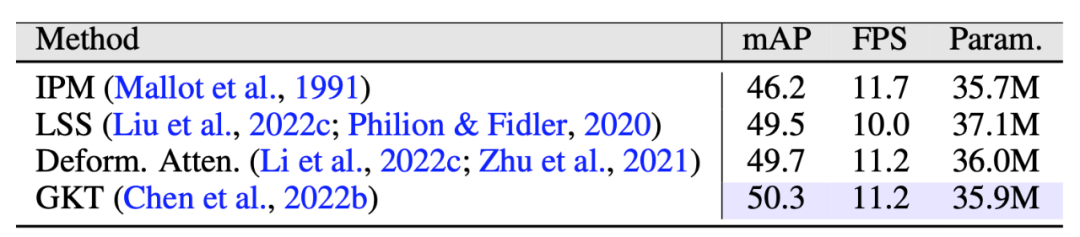
图四 与其他在线建图方法的对比

总结
[1] Nicolas Carion, Francisco Massa, Gabriel Synnaeve, Nicolas Usunier, Alexander Kirillov, and Sergey Zagoruyko. End-to-end object detection with transformers. In ECCV, 2020.
[2] Shaoyu Chen, Tianheng Cheng, Xinggang Wang, Wenming Meng, Qian Zhang, and Wenyu Liu. Efficient and robust 2d-to-bev representation learning via geometry-guided kernel transformer. arXiv preprint arXiv:2206.04584, 2022.
[3] Hanspeter A Mallot, Heinrich H Bu ̈lthoff, JJ Little, and Stefan Bohrer. Inverse perspective mapping simplifies optical flow computation and obstacle detection. Biological cybernetics, 1991.
[4] Zhiqi Li, Wenhai Wang, Hongyang Li, Enze Xie, Chonghao Sima, Tong Lu, Yu Qiao, and Jifeng Dai. Bevformer: Learning bird’s-eye-view representation from multi-camera images via spatiotemporal transformers. In ECCV, 2022.
[5] Jonah Philion and Sanja Fidler. Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d. In ECCV, 2020.
[6] Qi Li, Yue Wang, Yilun Wang, and Hang Zhao. Hdmapnet: An online hd map construction and evaluation framework. In ICRA, 2022.
[7] Yicheng Liu, Yue Wang, Yilun Wang, and Hang Zhao. Vectormapnet: End-to-end vectorized hd map learning. arXiv preprint arXiv:2206.08920, 2022.
分享文章




欢迎订阅地平线相关资讯,您可以随时取消订阅。

感谢您的订阅, 我们会第一时间推送地平线最新活动与资讯到您邮箱


