






CVPR 2022 | 基于径向对称性和分治策略的点云方位角归一化
2022/04/26


简介

图1 数据效率、收敛速度和性能上限
径向对称性
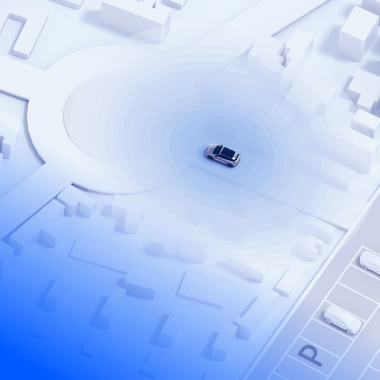
径向对称性与产生点云数据的传感器(LiDAR / RADAR /RGB-D camera)的工作原理高度相关。以LiDAR为例,如图2,LiDAR始终沿着径向(法向)方向向各个方位角发射电磁波,电磁波触碰到障碍物表面后反射,沿着径向方向反射的回波最终被LiDAR接收,形成点云。因此,产生的点云在径向方向上具有明显的对称性(如图2中,地面的点云对称性明显)。

图2 径向对称性(Radial Symmetry)
算法流程
Azimuth Normalization采用了分治的策略,具体流程如下(流程图见图3):
Patch Splitting:把整个感知范围拆分为相互重叠的块(patch), 把全场景的点云规则地分解为子点云;
Patch Filtering:滤除不包含点云的patch、只含地面点的patch(点云具有稀疏性、不均匀性),避免不必要的计算开销;
Normalization:对子点云进行平移变换、旋转变换(对每个点的3D坐标进行),统一各个patch的径向方向;
Patch-wise Perception:在patch level调用现成的感知算法(point-based、voxel-based、hybrid),不需要改变实现细节和超参数;
Inverse Normalization:把感知结果逆变换回原本的LiDAR坐标系;
Patch Merging:融合各个patch结果,对于不同的感知任务可以采用不同的融合策略,例如,对于检测采用非极大值抑制(NMS),对于分割采用逐点平均。

图3 算法流程
实验结果


表2 点云分割算法KPConv [3] 在SemanticKitti val set和test set上的实验结果

图4 扇形区域归一化(Sectorial Normalization)

表3 归一化粒度 (Normalization Granularity)

表4 消融实验
总结

分享文章






欢迎订阅地平线相关资讯,您可以随时取消订阅。

感谢您的订阅, 我们会第一时间推送地平线最新活动与资讯到您邮箱


