






ECCV 2024 | LaneGAP:基于连续路径建模的车道拓扑构建算法
2024/08/16


• LaneGAP 论文链接:
https://arxiv.org/abs/2303.08815
• 项目主页:
https://github.com/hustvl/LaneGAP
LaneGAP 方法概述
“
车道拓扑构建
车道拓扑构建包含着详细的车道级信息:方向,道路分叉,道路合并。这些信息对于车辆路径规划和控制十分重要。过去的车辆规划控制算法通过利用离线的高精地图,然而离线的车道拓扑信息的采集,维护和更新需要巨大的成本。随着自动驾驶中无图化去图化的发展,我们提出了在线构造车道拓扑的方法 LaneGAP。
LaneGAP 与之前的在线构造车道拓扑的方法不同,之前的方法可以大致分为以下两个范式:
• 基于图像分割(Pixel-wise),再加后处理得到车道拓扑信息
• 预测车道段(Piece-wise),再额外预测段与段的连接关系
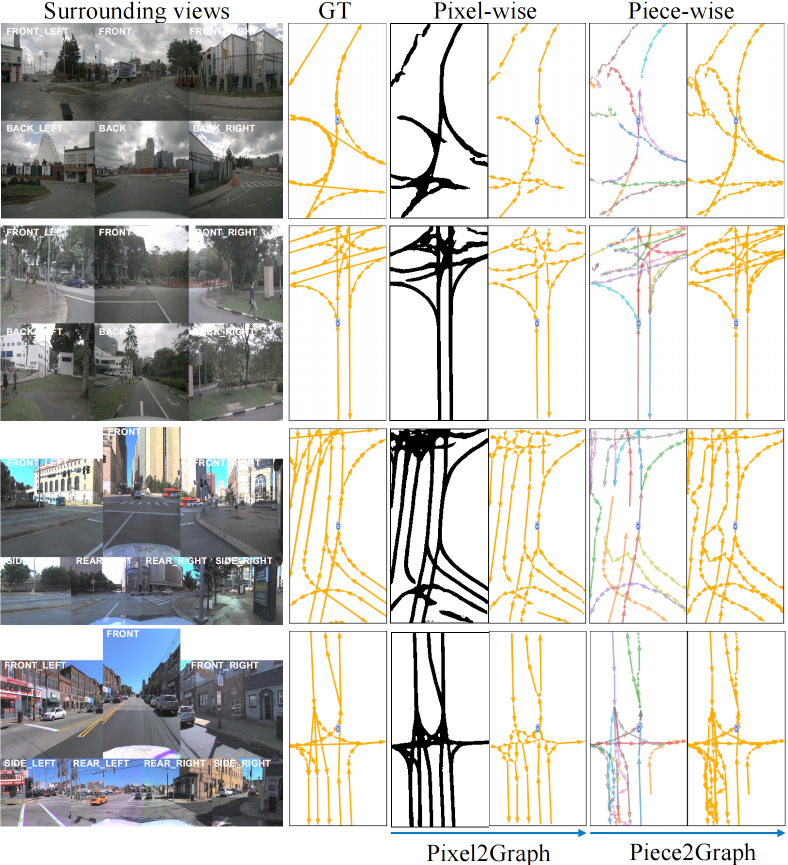
图1. Pixel-wise 和 Piece-wise 效果图
然而通过分析目前的方法的效果,我们发现构造的车道拓扑常常错连、少连,拓扑信息不够完整和连续。为此我们提出了一种全新的拓扑建模方法——基于连续路径建模,将车道拓扑中的图结构通过最短路径表示成一条条连续的路径(Path)。

图2. 拓扑建模方法对比
“
算法框架

图3. 算法框架
LaneGAP 基于 MapTR 将完整连续的车道路径表示成 Transformer 中的 query,通过与环境交互得到最终精准的形状。算法可以分为以下几个步骤:
1. 将图结构的道路拓扑通过 Graph2Path 的方法变成连续完整的路径集合;
2. 基于 MapTR 的框架,利用 Transformer 的中 query 机制去和环境交互,学习预测路径;
3. LaneGAP 预测的路径可以直接给 planning 使用,但为了和其他拓扑建模方式进行对比,我们提出了 Path2Graph 算法将 path 转换成道路拓扑的图结构表示,在以图结构为中心的 TOPO metric 下和各种拓扑建模方式进行对比。

左图:道路拓扑图转完整连续路径;右图:完整连续路径转道路拓扑
“
实验分析
我们选取以下几个 baseline 进行对比:
• 分割建模 (Pixel-wise):HDMapNet
• 分段连接建模 (Piece-wise):STSU, MapTR, TopoNet
我们在 nuScenes、Argoverse2 和 Openlane-V2 三个数据集上进行全面的对比评测,使用以图结构为中心的 metric——TOPO 指标,针对完整的图结构以及分岔点和合并点的子图结构进行评测。


结果显示 LaneGAP 不仅在 TOPO metric 上表现优越,在分割指标 IOU 上也具有明显优势。
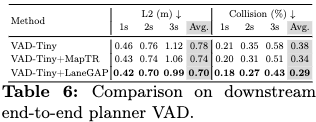
我们还分析了车道中心线拓扑结构对下游 planning 的影响,结果显示完整路径建模显示更为卓越的性能。
“
定性对比
通过下图的定性对比,可以发现使用完整路径建模的 LaneGAP,可以在线构建具有更为完整、更为正确的道路拓扑结构。


总结与展望
本工作提出的 LaneGAP 方法在自动驾驶车道拓扑构建领域具有重要的创新性和实际应用价值。通过引入路径化建模,LaneGAP 有效解决了现有方法在车道连续性和拓扑复杂性上的不足,实现了更加精确和高效的车道图构建。这种方法不仅提升了自动驾驶系统在复杂交通环境下的规划能力,还显著提高了系统的响应速度和稳定性。尤其值得注意的是,LaneGAP 已成功应用于地平线高阶智驾方案中,验证了其在真实场景中的可靠性与实用性。因此,该工作为推动自动驾驶技术的发展奠定了坚实的基础,并将在未来的智能交通系统中发挥关键作用。
.
分享文章






欢迎订阅地平线相关资讯,您可以随时取消订阅。

感谢您的订阅, 我们会第一时间推送地平线最新活动与资讯到您邮箱


